TRAIL: Mobile mapping in urban areas becomes more accurate and autonomous
June 10, 2026
FBK and 3D Target develop a new SLAM pipeline based on the integration of LiDAR and inertial data, improving the accuracy, reliability, and speed of 3D surveys even under challenging GNSS conditions.
Making 3D surveys more accurate, faster, and more reliable, even where GPS performs poorly: this is the challenge addressed by the TRAIL project, developed through a collaboration between FBK and 3D Target Thanks to the intelligent integration of LiDAR sensors, inertial data, and advanced SLAM algorithms, the new solution improves the autonomy of mobile mapping systems and delivers survey accuracy within a few centimeters, even in complex urban environments.
As part of the EDIH-SoE InnovAction initiative, co-funded by the Italian Ministry of Enterprises and Made in Italy (MIMIT), the collaboration between the 3DOM unit at FBK’s Center for Digital Industry and 3D Target, a company active in terrestrial and drone-based 3D surveying, has been completed. The 3DOM team, led by Fabio Remondino, worked with the company on the TRAIL – Trajectory Reconstruction and Augmentation using Inertial and LiDAR Data project, developed within the framework of the “Twin Transition – PoC” service. Specializing in integrated solutions for 3D surveying and mapping of infrastructure and natural environments, 3D Target has established itself as one of the leading technology providers in the mobile mapping sector, thanks to its proprietary Scanfly platform.
In a rapidly evolving market, the goal of the collaboration was to achieve a further technological leap forward: increase the absolute accuracy of surveys, especially under degraded or unavailable satellite signal conditions, improve acquisition reliability, and significantly reduce the processing time required for collected 3D data.
A new generation of SLAM for mobile mapping
The TRAIL project was launched with the goal of developing a SLAM (Simultaneous Localization and Mapping)-based methodology to optimize surveys conducted with Scanfly systems within the proprietary SmartProcessing LiDAR platform.
The developed solution combines data from terrestrial LiDAR sensors, IMU systems, and GNSS observations to improve the quality of the survey trajectory, particularly in urban environments characterized by limited, intermittent, or completely unavailable satellite coverage.
The initiative is part of a broader digital transition effort in the three-dimensional surveying sector, introducing advanced georeferencing and spatial analysis methodologies capable of increasing automation, interoperability, and the geometric detail of acquired data.
Improving the quality of 3D surveys conducted with mobile mapping systems makes urban, road, and forestry asset analyses more reliable, accelerating the digital transformation of infrastructure management and maintenance processes.

Sistema Scanfly Duo di 3D Target
From operational requirements to dataset collection
The design phase began with a detailed definition of the technical and operational requirements needed to develop the SLAM solution. This work made it possible to identify the required characteristics in terms of sensors, acquisition frequencies, hardware configuration, and validation metrics, establishing the Scanfly EVO system as the reference platform for data collection, with extension to Scanfly PRO configurations for the most complex scenarios. Particular attention was given to compatibility with SmartProcessing LiDAR, the proprietary software used by 3D Target to process data collected with Scanfly systems.
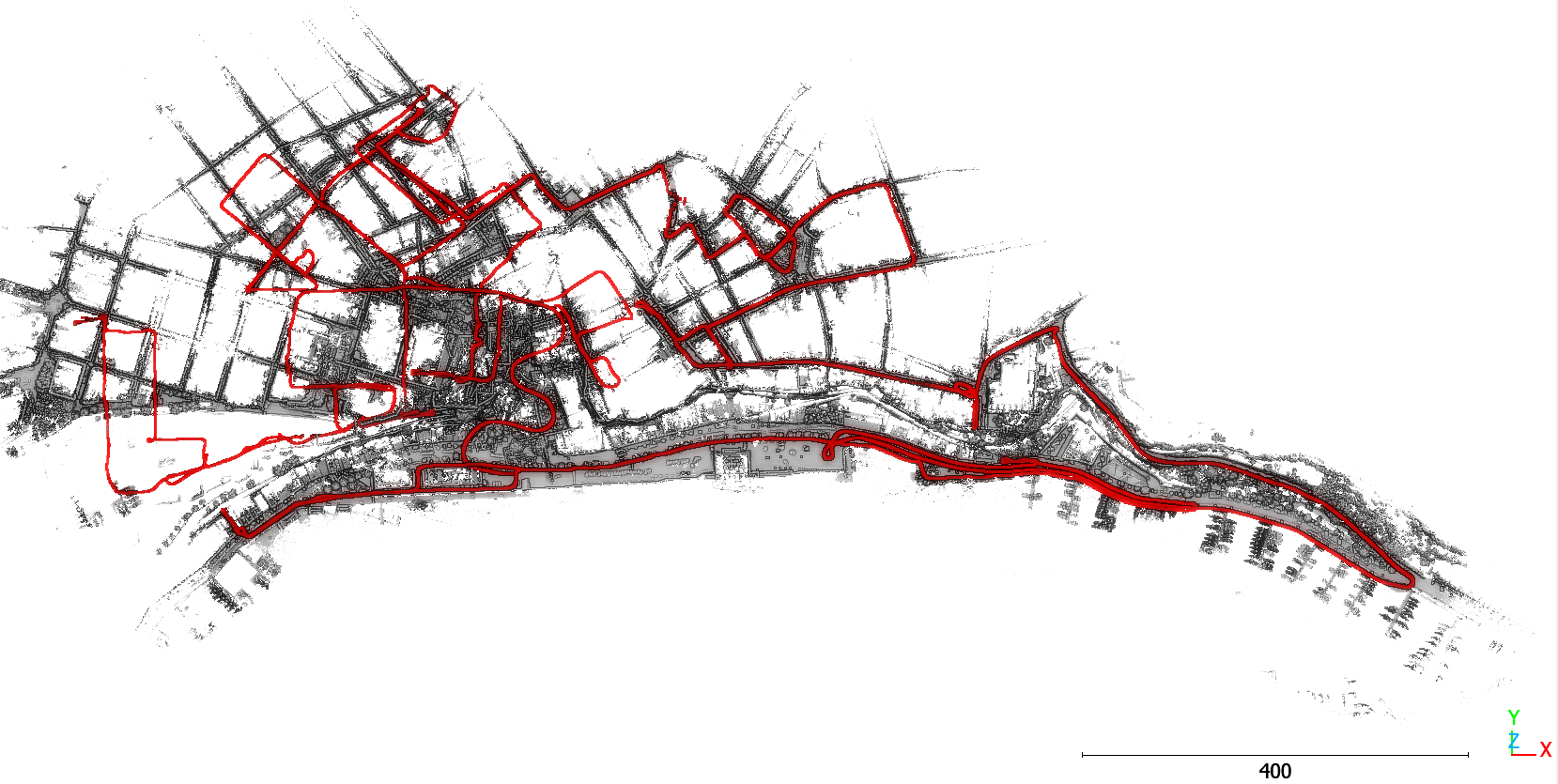
Subsequently, an extensive data collection campaign was carried out in real-world environments through significant surveying activities conducted with Scanfly systems in urban, natural, and mixed settings. The acquired datasets include scenarios with varying levels of complexity: surveys in areas with good GNSS coverage, surveys in environments with poor satellite reception, mobile surveys using bicycle-mounted systems, and backpack-based surveys in natural environments where satellite signals are unavailable. Creating diverse datasets was essential to ensure full consistency between the developed algorithms and the actual operating conditions of Scanfly systems, avoiding the limitations typically associated with available public benchmarks.
The new SLAM pipeline developed in the TRAIL project
The core of the TRAIL project is a new processing pipeline based on SLAM algorithms and INS/GNSS integration, designed to improve the accuracy and reliability of 3D surveys. The system operates on two levels. At the first level, a technology known as LiDAR-Inertial Odometry (LIO) combines inertial sensor data with LiDAR scans to generate an initial estimate of the survey trajectory. At the second level, an optimization process called Plane Bundle Adjustment (PBA) corrects residual errors and improves the geometric consistency of the 3D point cloud.
By integrating INS/GNSS data with the co-registration of LiDAR profiles, the system maintains high accuracy even in the absence of GNSS signals, leveraging the robustness of LiDAR data and the continuity provided by inertial sensors.
Accuracy within 5 centimeters and reduced processing times
The results achieved have led to a clear improvement in the performance of Scanfly systems. The project’s objective was to achieve accuracy better than 5 centimeters under any operating condition while reducing 3D model processing times by up to 50%. This eliminates the need for additional surveys or post-processing corrections that are often required when GNSS signals are weak or unreliable.
Validation tests confirmed the reliability of the solution and its effective integration into the SmartProcessing LiDAR workflow.
A step toward fully digital 3D surveying
The TRAIL project represents an important step toward increasingly autonomous, interoperable, and intelligent land-based mobile mapping systems. The ability to combine LiDAR, inertial sensors, and advanced SLAM algorithms into a single software pipeline opens up new application perspectives in both outdoor and indoor environments, expanding the potential use of Scanfly platforms in areas such as infrastructure monitoring, smart cities, forest management, and land digitization.
For 3D Target, the initiative also represents a significant competitive advantage in the international market, thanks to the integration of advanced capabilities that enhance the precision, automation, and speed of three-dimensional surveying processes.
The author/s
Related articles